


El proceso de ingeniería de drones suele funcionar como un “bucle de diseño” (design loop), que hace referencia a la naturaleza iterativa del proceso de diseño. La construcción de la primera versión del dron se basa en ciertas suposiciones, muchas de las cuales cambian a medida que se seleccionan componentes y el diseño evoluciona.
En este artículo se tratarán los siguientes temas:
Para recopilar los datos utilizados en este artículo se empleará el banco de empuje Series 1585.

El bucle de diseño comienza cuando el diseñador analiza cómo la primera versión del diseño difiere de las hipótesis iniciales y vuelve al principio con la nueva información obtenida (figura 1).

Figura 1: El bucle de diseño del dron ilustradoRevisión inicial
Una vez encontrada la combinación más eficiente, ya se disponía de las herramientas necesarias para estimar el tiempo de vuelo.
Para este artículo se utilizará un desglose más preciso de masas para el dron de 777 g:
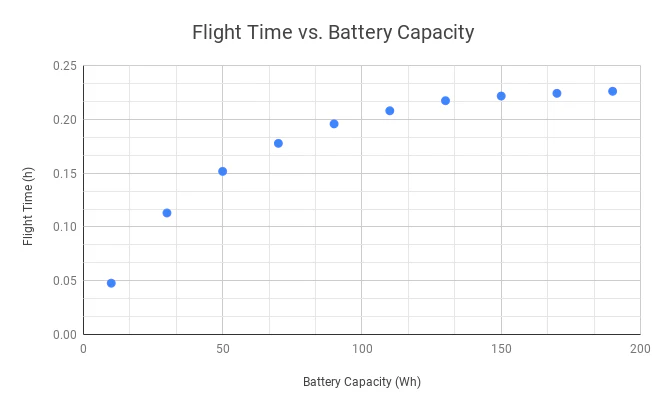
Figura 2: Tiempo de vuelo vs. capacidad de batería para el diseño original del dron
Iteración 2: Elegir una batería nueva para el máximo tiempo de vuelo
Hasta la marca de 0,2 horas hay un aumento en el tiempo de vuelo con mayor capacidad de batería, pero tras unos 100 - 125 Wh las ganancias marginales se vuelven menos significativas. Por esta razón, empezaremos cambiando nuestra batería antigua por una nueva que tiene entre 100 y 125 Wh de capacidad para aumentar nuestro tiempo de vuelo. El paquete Turnigy 5000mAh 6S LiPo cumple perfectamente con nuestros criterios con una capacidad de 111 Wh (figura 3).

Esta nueva batería pesa nada menos que 655 g frente a la antigua, que pesaba solo 155 g. Suponiendo que todos nuestros demás componentes se mantengan igual, en 622 g, la masa total de nuestro dron es ahora de 1.277 g.
Por lo tanto, necesitaremos producir al menos 12,5 N de empuje para que el dron pueda mantenerse en suspensión (1,277 kg * 9,81), algo más de 3,1 N por hélice. También nos gustaría lograr al menos el doble de ese empuje para tener una buena autoridad de control, así que buscaremos la hélice más eficiente a 3,1 N, pero que también pueda alcanzar hasta 6,2 N de empuje.
Para repasar, tenemos tres hélices en nuestra lista de candidatos:
6030R Gemfan = > diámetro: 6", paso: 3", masa 2,22 g
6040R King Kong = > diámetro: 6", paso: 4", masa 3,38 g
5030R Gemfan = > diámetro: 5", paso: 4", masa 3,00 g
Trabajaremos bajo la suposición de que el bastidor del dron está ajustado y no podemos superar los 6" de diámetro para nuestras hélices. Podemos conocer a nuestros tres candidatos a hélice consultando Tyto Robotics base de datos de motores eléctricos, hélices y ESC. Datos de prueba como empuje, par, RPM, potencia, eficiencia y más se recogen utilizando uno de nuestros bancos de pruebas de propulsión, y para este dron el Serie 1585 Probablemente sería la mejor opción.
Para nuestros candidatos, los datos de la base de datos nos indican que las tres hélices alcanzan nuestro empuje estacionario de 3,1 N, pero solo el 6040R King Kong se acerca al empuje máximo de 6,2 N (0,63 kgf) (figura 4).
Hélice 1 → diámetro: 6", paso: 4", masa: 3,38 g, material: plástico
Hélice 2 → diámetro: 6", paso: 4", masa: 4,32 g, material: nailon
Hélice 3 → diámetro: 6", paso: 4,5", masa: 6,78 g, material: fibra de carbono (CF)
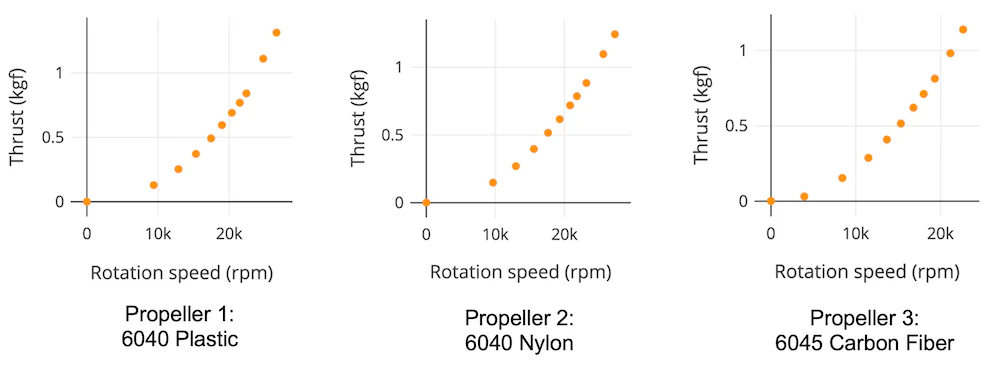
Figura 5: Empuje frente a RPM para los nuevos candidatos a hélice
Como puedes ver en la figura 5, todos nuestros candidatos a hélice pueden producir 10 N (1 kgf) de empuje o más. Por esta razón, podemos aspirar a un empuje en suspensión de 5 N y un empuje máximo de 10 N, lo que nos permitirá levantar una batería mayor con la misma unidad de propulsión.
Como se muestra en la figura 6, con nuestro empuje estacionario original de 3,1 N (0,32 kgf) y con nuestro nuevo empuje estacionario de 5,0 N (0,51 kgf), la eficiencia de la hélice 1 y la hélice 2 es muy similar, separada por solo unos 0,1 gf/W. La hélice 2 es ligeramente más eficiente, pero también más pesada. Este aumento de peso podría provocar un tiempo de vuelo más corto y dejar menos masa disponible para la batería. En un cuadricóptero, la diferencia total sería de 3,76 g ((4,32 g - 3,38 g)*4).
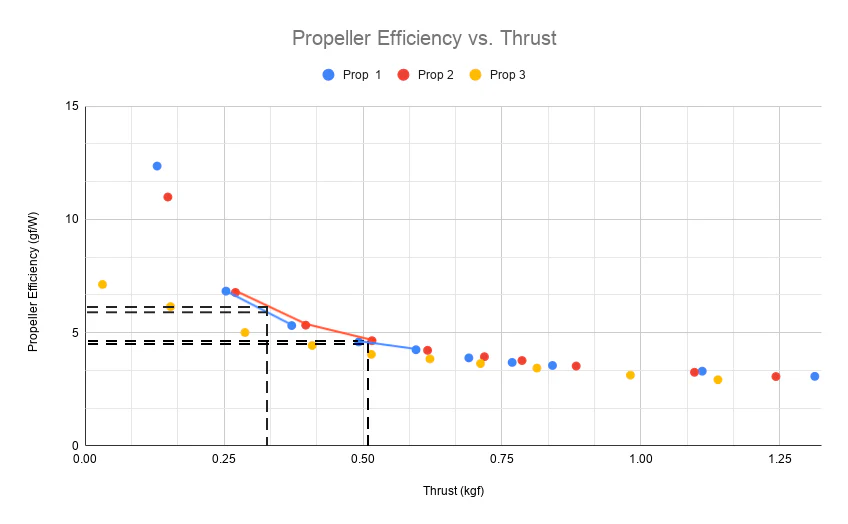
Figura 6: Eficiencia de la hélice frente al empuje para los nuevos candidatos a hélice
De la base de datos encontramos el Hypetrain Blaster 2207 2450 Kv, que cumple nuestros criterios. Realizamos una prueba con cada uno de los dos motores emparejados con la hélice 2, y los resultados se muestran en la figura 8. El motor 2, EMAX RSII 2207 2300 kV, es el más eficiente con la hélice 2 en nuestro punto de operación en suspensión de 5 N (0,51 kgf) y además es más eficiente con nuestro empuje máximo de 10 N (1,02 kgf). La diferencia de eficiencia al empuje en suspensión es de aproximadamente el 2,2% (55,6% frente a 53,4%), pero el motor de 2300 Kv también es más ligero (32,37 g frente a 36,96 g), así que facilita nuestra decisión.
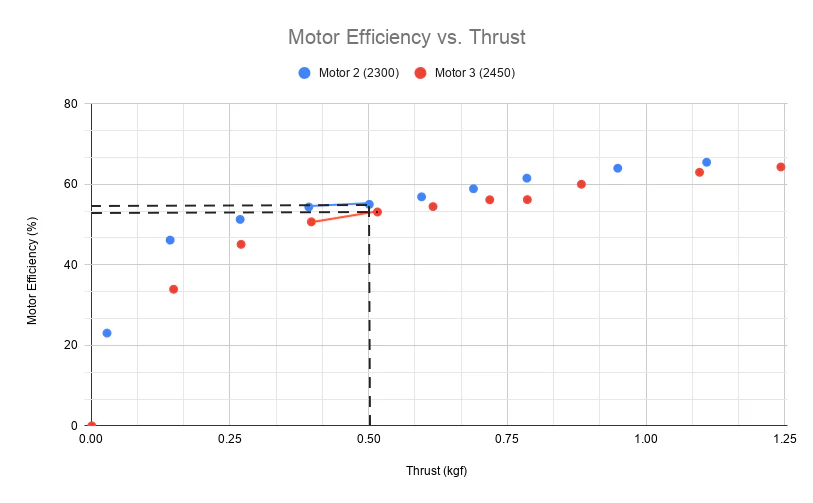
Figura 8: Eficiencia del motor frente al empuje para candidatos a motores de 2300 kV y 2450 kV
Iteración 4: Elegir una nueva batería para el máximo tiempo de vuelo que se ajuste a nuestro nuevo diseño
Ahora es un buen momento para resumir la masa de nuestros componentes, ya que la masa de nuestras hélices y motores ha cambiado, así como nuestro empuje en suspensión estacionaria. Aquí está el nuevo desglose:
Motores (4): 129,5 g
Hélices (4): 17,3 g
Otros componentes (cámara, fotograma, ESC, etc.): 460,5 g
Masa antes de la batería: 607,3 g
Masa máxima: ~ 2.000 g
Basándonos en estos nuevos valores, disponemos de 1392,7 g de masa para nuestra batería.
Como también tenemos el motor y la hélice elegidos, también podemos determinar nuestras necesidades de descarga (clasificación C), que también serán a tener en cuenta a la hora de elegir la batería. Queremos asegurarnos de que nuestro motor no consuma más corriente de la que puede proporcionar la batería, o de lo contrario la batería podría degradarse o sobrecalentarse rápidamente. La fórmula para determinar el consumo de corriente de una batería es: Corriente (A) = C nominal * Capacidad (Ah).
No hay información sobre corriente continua o de ráfaga para el EMAX RSII 2207 2300 Kv en línea, pero podemos consultar datos en la base de datos de Tyto Robotics y comparar todas las pruebas realizadas con este motor. Como podemos ver en la figura 9, la corriente máxima alcanzada durante varias pruebas fue de unos 42 A.
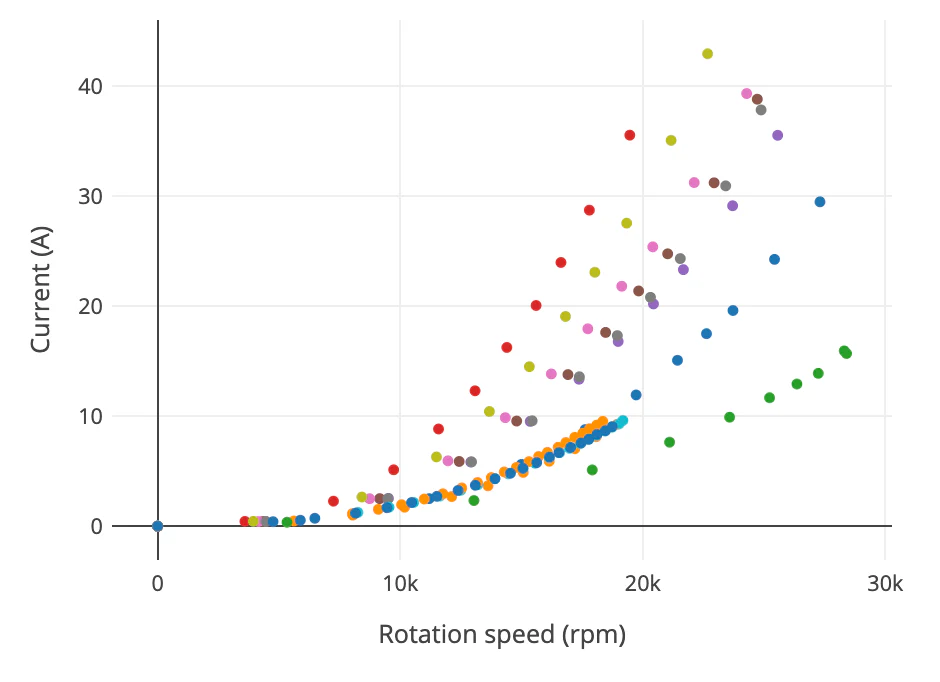
Figura 9: Corriente vs. velocidad de rotación para el motor EMAX RSII 2207 de 2300 kV
El Turnigy High Capacity 16000 mAh 4S 12C Lipo Pack tiene la mayor capacidad en Wh de todas las baterías de nuestro rango de peso, dándonos 4 3,7 16 = 236,8 Wh. Pesa 1.366 g, tiene una potencia nominal de descarga de 12 °C y una capacidad de 16 Ah, por lo que puede manejar un consumo de corriente de 192 A, que es más de lo que necesitamos.
El tiempo de vuelo depende de la capacidad de la batería y de la potencia que consume el sistema de propulsión. Muchos factores entran en juego así, resumidos en la fórmula a continuación

Como hemos visto, el proceso de diseño de drones es cíclico y casi siempre hay margen para mejorar un diseño.
Si quieres llevar tu diseño un paso más allá, considera Añadiendo sensores personalizados A tu configuración de prueba.
Recopilar datos de propulsión es una de las mejores formas de determinar dónde hay margen de mejora en tu dron, y ofrecemos muchas Soportes y herramientas de empuje para ayudarte a hacerlo.
En este artículo se tratarán los siguientes temas:
- Cómo encontrar una batería para aumentar el tiempo de vuelo
- Cómo elegir un motor y una hélice para drones (con base de datos)
- Sustitución de componentes para maximizar la eficiencia
- Cómo elegir un ESC
- Cómo calcular el tiempo de vuelo de un dron
Para recopilar los datos utilizados en este artículo se empleará el banco de empuje Series 1585.
El bucle de diseño comienza cuando el diseñador analiza cómo la primera versión del diseño difiere de las hipótesis iniciales y vuelve al principio con la nueva información obtenida (figura 1).
Figura 1: El bucle de diseño del dron ilustrado
Revisión inicial
El proceso de diseño comenzó suponiendo que el dron pesaría 777 g y sería capaz de volar por sí solo. Con esas hipótesis se estimó que serían necesarios 1,9 N de empuje por hélice para mantenerse en vuelo estacionario (hover), por lo que se buscó la combinación motor-hélice más eficiente a ese nivel de empuje.
Una vez encontrada la combinación más eficiente, ya se disponía de las herramientas necesarias para estimar el tiempo de vuelo.Para este artículo se utilizará un desglose más preciso de masas para el dron de 777 g:
- Motores (4): 148 g
- Hélices (4): 13,5 g
- Batería (1): 155 g
- Otros componentes (cámara, chasis, ESC, etc.): 460,5 g
Tiempo de vuelo
Nuestro objetivo es maximizar el tiempo de vuelo de nuestro dron para que pueda flotar el mayor tiempo posible. En nuestro artículo anterior, modelamos el tiempo de vuelo de nuestro dron con una capacidad variable de batería (figura 2).
Figura 2: Tiempo de vuelo vs. capacidad de batería para el diseño original del dron
Supusimos que nuestro diseño incluiría una batería nanotecnológica Turnigy de 1300 mAh 4S e incluimos su masa en nuestros cálculos generales. La capacidad de la batería es algo más de 19,2 Wh (14,8 V * 1,3 Ah = 19,2 Wh), lo que ocurre dentro de la fase de crecimiento del gráfico y nos da solo unos 4,5 minutos de vuelo.
Si aumentáramos la capacidad de la batería, también podríamos aumentar el tiempo de vuelo, pero la compensación sería un aumento de peso. Aquí es donde comienza el bucle de diseño, ya que intercambiamos componentes para intentar construir el dron que mejor se adapte a nuestras necesidades.
Iteración 2: Elegir una batería nueva para el máximo tiempo de vuelo
Hasta la marca de 0,2 horas hay un aumento en el tiempo de vuelo con mayor capacidad de batería, pero tras unos 100 - 125 Wh las ganancias marginales se vuelven menos significativas. Por esta razón, empezaremos cambiando nuestra batería antigua por una nueva que tiene entre 100 y 125 Wh de capacidad para aumentar nuestro tiempo de vuelo. El paquete Turnigy 5000mAh 6S LiPo cumple perfectamente con nuestros criterios con una capacidad de 111 Wh (figura 3).
Figura 3: Batería LiPo Turnigy 5000 mAh/ 111 Wh (Foto: HobbyKing)
Esta nueva batería pesa nada menos que 655 g frente a la antigua, que pesaba solo 155 g. Suponiendo que todos nuestros demás componentes se mantengan igual, en 622 g, la masa total de nuestro dron es ahora de 1.277 g.
Por lo tanto, necesitaremos producir al menos 12,5 N de empuje para que el dron pueda mantenerse en suspensión (1,277 kg * 9,81), algo más de 3,1 N por hélice. También nos gustaría lograr al menos el doble de ese empuje para tener una buena autoridad de control, así que buscaremos la hélice más eficiente a 3,1 N, pero que también pueda alcanzar hasta 6,2 N de empuje.
Para repasar, tenemos tres hélices en nuestra lista de candidatos:
6030R Gemfan = > diámetro: 6", paso: 3", masa 2,22 g
6040R King Kong = > diámetro: 6", paso: 4", masa 3,38 g
5030R Gemfan = > diámetro: 5", paso: 4", masa 3,00 g
Trabajaremos bajo la suposición de que el bastidor del dron está ajustado y no podemos superar los 6" de diámetro para nuestras hélices. Podemos conocer a nuestros tres candidatos a hélice consultando Tyto Robotics base de datos de motores eléctricos, hélices y ESC. Datos de prueba como empuje, par, RPM, potencia, eficiencia y más se recogen utilizando uno de nuestros bancos de pruebas de propulsión, y para este dron el Serie 1585 Probablemente sería la mejor opción.
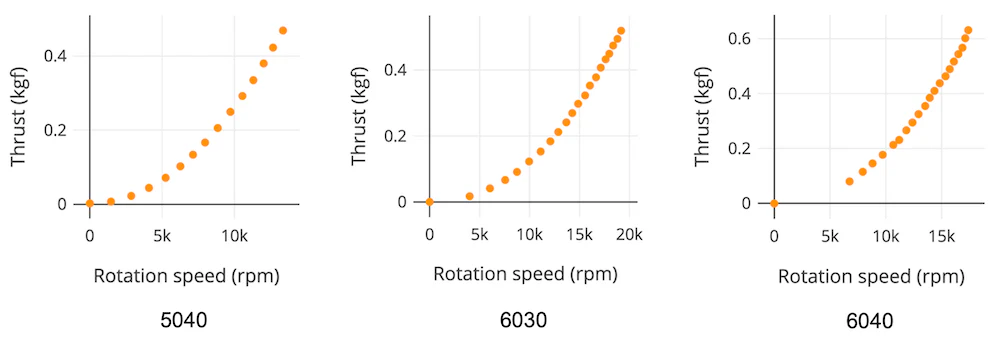
Para nuestros candidatos, los datos de la base de datos nos indican que las tres hélices alcanzan nuestro empuje estacionario de 3,1 N, pero solo el 6040R King Kong se acerca al empuje máximo de 6,2 N (0,63 kgf) (figura 4).
Figura 4: Rendimiento de empuje de los candidatos a hélice
Estos resultados sugieren que o bien nuestra batería es demasiado pesada o que la combinación motor/hélice no producía suficiente empuje. Nuestro objetivo es tener el mayor tiempo de vuelo posible, así que en lugar de buscar una batería más pequeña de inmediato, exploremos más hélices que encajen dentro de los límites de nuestro chasis, pero que generen más empuje.
Iteración 3: Selección de nuevos candidatos a hélices y motoresNuestro chasis nos limita a hélices de 6" o menos de diámetro, pero aún podemos experimentar con nuestro tono de tono y marca. Usaremos el Base de datos de componentes de drones filtrar hélices de 6" de diámetro y que produzcan al menos 6,2 N (0,63 kgf) de fuerza. Esta búsqueda ofreció varias buenas opciones, pero para simplificar la reduciremos a tres candidatos que generan más impulso:Estos resultados sugieren que o bien nuestra batería es demasiado pesada o que la combinación motor/hélice no producía suficiente empuje. Nuestro objetivo es tener el mayor tiempo de vuelo posible, así que en lugar de buscar una batería más pequeña de inmediato, exploremos más hélices que encajen dentro de los límites de nuestro chasis, pero que generen más empuje.
Hélice 1 → diámetro: 6", paso: 4", masa: 3,38 g, material: plástico
Hélice 2 → diámetro: 6", paso: 4", masa: 4,32 g, material: nailon
Hélice 3 → diámetro: 6", paso: 4,5", masa: 6,78 g, material: fibra de carbono (CF)
Figura 5: Empuje frente a RPM para los nuevos candidatos a hélice
Como puedes ver en la figura 5, todos nuestros candidatos a hélice pueden producir 10 N (1 kgf) de empuje o más. Por esta razón, podemos aspirar a un empuje en suspensión de 5 N y un empuje máximo de 10 N, lo que nos permitirá levantar una batería mayor con la misma unidad de propulsión.
Como se muestra en la figura 6, con nuestro empuje estacionario original de 3,1 N (0,32 kgf) y con nuestro nuevo empuje estacionario de 5,0 N (0,51 kgf), la eficiencia de la hélice 1 y la hélice 2 es muy similar, separada por solo unos 0,1 gf/W. La hélice 2 es ligeramente más eficiente, pero también más pesada. Este aumento de peso podría provocar un tiempo de vuelo más corto y dejar menos masa disponible para la batería. En un cuadricóptero, la diferencia total sería de 3,76 g ((4,32 g - 3,38 g)*4).
Figura 6: Eficiencia de la hélice frente al empuje para los nuevos candidatos a hélice
Tras echar un vistazo rápido a los mercados online, queda claro que el 4G no supone ninguna diferencia en cuanto a capacidad para baterías de este tamaño. Por esta razón, y el efecto insignificante de 4 g de masa para nuestro dron, tiene sentido usar la hélice 2 debido a su mayor eficiencia.
Nuestro siguiente paso será encontrar el motor sin escobillas que sea más eficiente con esta hélice a nuestro nuevo empuje en suspensión de 5 N. En general, buscamos un motor que pueda superar nuestro empuje máximo de 10 N, pero no por un margen demasiado grande. No queremos hacer funcionar el motor a su velocidad máxima durante demasiado tiempo, pero tampoco queremos arrastrar un motor que produzca más empuje y par de los que necesitamos.
De los dos motores que probamos previamente, MultiStar Elite 2306 2150 Kv y EMAX RSII 2207 2300 Kv, solo el motor de 2300 Kv cumple con nuestro requisito de empuje máximo (figura 7). Por lo tanto, tendremos que usar la base de datos motora para encontrar un nuevo candidato.
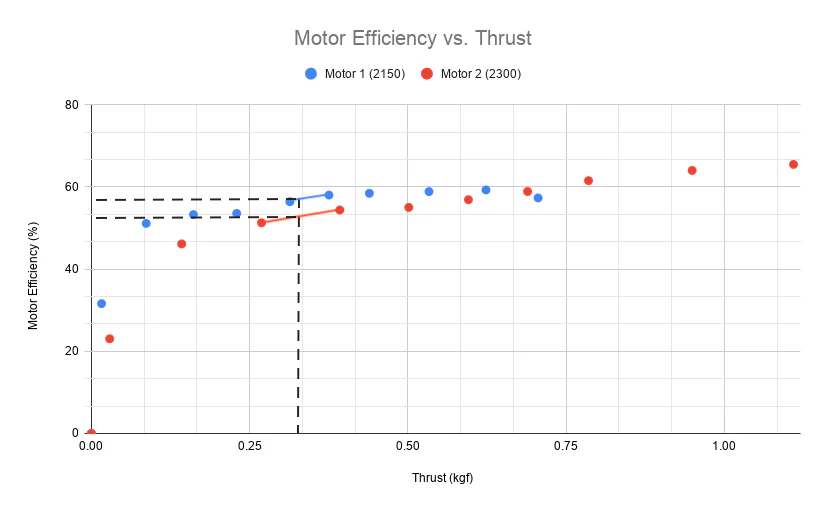
Figura 7: Eficiencia del motor frente al empuje para candidatos a motores de 2150 kV y 2300 KvDe la base de datos encontramos el Hypetrain Blaster 2207 2450 Kv, que cumple nuestros criterios. Realizamos una prueba con cada uno de los dos motores emparejados con la hélice 2, y los resultados se muestran en la figura 8. El motor 2, EMAX RSII 2207 2300 kV, es el más eficiente con la hélice 2 en nuestro punto de operación en suspensión de 5 N (0,51 kgf) y además es más eficiente con nuestro empuje máximo de 10 N (1,02 kgf). La diferencia de eficiencia al empuje en suspensión es de aproximadamente el 2,2% (55,6% frente a 53,4%), pero el motor de 2300 Kv también es más ligero (32,37 g frente a 36,96 g), así que facilita nuestra decisión.
Figura 8: Eficiencia del motor frente al empuje para candidatos a motores de 2300 kV y 2450 kV
Iteración 4: Elegir una nueva batería para el máximo tiempo de vuelo que se ajuste a nuestro nuevo diseño
Ahora es un buen momento para resumir la masa de nuestros componentes, ya que la masa de nuestras hélices y motores ha cambiado, así como nuestro empuje en suspensión estacionaria. Aquí está el nuevo desglose:
Motores (4): 129,5 g
Hélices (4): 17,3 g
Otros componentes (cámara, fotograma, ESC, etc.): 460,5 g
Masa antes de la batería: 607,3 g
Masa máxima: ~ 2.000 g
Basándonos en estos nuevos valores, disponemos de 1392,7 g de masa para nuestra batería.
Como también tenemos el motor y la hélice elegidos, también podemos determinar nuestras necesidades de descarga (clasificación C), que también serán a tener en cuenta a la hora de elegir la batería. Queremos asegurarnos de que nuestro motor no consuma más corriente de la que puede proporcionar la batería, o de lo contrario la batería podría degradarse o sobrecalentarse rápidamente. La fórmula para determinar el consumo de corriente de una batería es: Corriente (A) = C nominal * Capacidad (Ah).
No hay información sobre corriente continua o de ráfaga para el EMAX RSII 2207 2300 Kv en línea, pero podemos consultar datos en la base de datos de Tyto Robotics y comparar todas las pruebas realizadas con este motor. Como podemos ver en la figura 9, la corriente máxima alcanzada durante varias pruebas fue de unos 42 A.
Figura 9: Corriente vs. velocidad de rotación para el motor EMAX RSII 2207 de 2300 kV
El Turnigy High Capacity 16000 mAh 4S 12C Lipo Pack tiene la mayor capacidad en Wh de todas las baterías de nuestro rango de peso, dándonos 4 3,7 16 = 236,8 Wh. Pesa 1.366 g, tiene una potencia nominal de descarga de 12 °C y una capacidad de 16 Ah, por lo que puede manejar un consumo de corriente de 192 A, que es más de lo que necesitamos.
Iteración 5: Elegir un ESC
La principal consideración para elegir un ESC es que pueda suministrar la corriente máxima del motor. En nuestro caso no esperamos que nuestro motor supere los 42 A, así que un ESC como el HobbyKing 60A ESC 4A SBEC funcionará muy bien. Puede suministrar una corriente constante de hasta 60 A y una corriente de ráfaga de hasta 80 A, mientras que proporciona 4 A al BEC. Esto nos da un margen de seguridad, así que este ESC será una buena opción para nuestro dron.

Figura 10: HobbyKing 60A ESC 4A SBEC (Foto: HobbyKing)
Calculando nuestro tiempo de vueloFigura 10: HobbyKing 60A ESC 4A SBEC (Foto: HobbyKing)
El tiempo de vuelo depende de la capacidad de la batería y de la potencia que consume el sistema de propulsión. Muchos factores entran en juego así, resumidos en la fórmula a continuación
Donde
E = capacidad
σ = densidad energética
M = masa en gramos (g)
Podemos copiar + pegar nuestros datos de prueba de propulsión en este útil Calculadora de tiempo de vuelo, introduce nuestro peso y capacidad de batería, y nos dará la mejor estimación del tiempo de vuelo basada en nuestros datos. Nuestro tiempo estimado de vuelo es de 15,2 minutos (figura 11), lo que supone una mejora significativa respecto a nuestro diseño original, que solo tenía unos 4,5 minutos de vuelo.
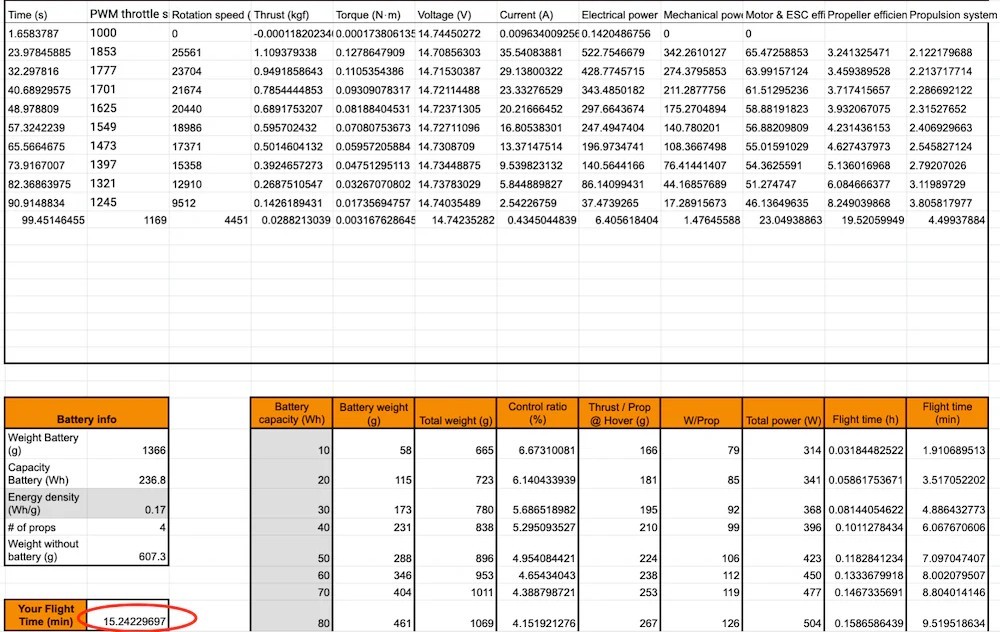
Figura 11: Uso de la calculadora de tiempo de vuelo para estimar el tiempo de vuelo de nuestro dron
ConclusiónFigura 11: Uso de la calculadora de tiempo de vuelo para estimar el tiempo de vuelo de nuestro dron
Como hemos visto, el proceso de diseño de drones es cíclico y casi siempre hay margen para mejorar un diseño.
Si quieres llevar tu diseño un paso más allá, considera Añadiendo sensores personalizados A tu configuración de prueba.
Recopilar datos de propulsión es una de las mejores formas de determinar dónde hay margen de mejora en tu dron, y ofrecemos muchas Soportes y herramientas de empuje para ayudarte a hacerlo.


